Bayesian Deep Learning in Push
Introduction
In this notebook, we will demonstrate various features of Push by using it to train a deep ensemble on a synthetic sine wave datasat generated as below:
A deep ensemble is one of many methods for performing Bayesian deep learning (BDL). BDL applies Bayesian inference to neural networks (NNs) in order to bring the benefits of Bayesian inference to deep learning (DL) such as uncertainty quantification. For more background on BDL, we recommend Kevin Murphy’s book “Probabilistic Machine Learning: Advanced Topics, Kevin Murphy, Chapter 17” on BDL [1].
Setting up the Dataset
We begin by creating the sine wave dataset with \(D = 1\) dimensions defined on the interval \((-2\pi, 2\pi)\) with \(N = 2048\) data points.
[1]:
import math
import torch
from torch.utils.data import Dataset
from experiments.nns.bdl import SineWithNoiseDataset
from experiments.nns.bdl import SineDataset
# # Define the dataset as a PyTorch dataset
# class SineWithNoiseDataset(Dataset):
# def __init__(self, N, D, begin, end, noise_std=1):
# self.xs = torch.linspace(begin, end, N).reshape(N, D)
# true_ys = torch.sin(self.xs[:, 0]).reshape(-1, 1)
# mean = torch.zeros(true_ys.size()[0])
# std = torch.exp(torch.linspace(torch.log(noise_std), torch.log(4 * noise_std), true_ys.size()[0]))
# noise = torch.normal(mean, std).view(-1, 1)
# self.ys = true_ys + noise
# def __len__(self):
# return len(self.xs)
# def __getitem__(self, idx):
# return self.xs[idx], self.ys[idx]
D = 1 # dimensions
N = 128 # number of points
train_begin_radians = -0.5 * math.pi # left interval
train_end_radians = 0.5 * math.pi # right interval
dataset = SineWithNoiseDataset(N, D, train_begin_radians, train_end_radians)
normal_dataset = SineDataset(N, D, train_begin_radians, train_end_radians)
Plotting the Dataset
We visualize the sine wave dataset dataset below. The dataset has noise applied to it to simulate data uncertainty. The larger the noise value is, the more uncertain our model should be.
[2]:
import matplotlib.pyplot as plt
fig, ax = plt.subplots(figsize=(8, 8))
ax.scatter(dataset.xs, dataset.ys, c ='green', label="Training data")
ax.plot(normal_dataset.xs, normal_dataset.ys, c = "blue", label="Underlying Generated Data")
ax.plot()
ax.legend()
plt.xlabel('Input X')
plt.ylabel('Target Y')
# ax.set(xlim=(xmin-1, xmax+1), ylim=(ymin-1, ymax+1), aspect='equal')
ax.spines['right'].set_visible(False)
ax.spines['top'].set_visible(False)
ax.spines['bottom'].set_position('zero')
ax.spines['left'].set_position('zero')
ax.set_xlabel('$x$', size=14, labelpad=-24, x=1.02)
ax.set_ylabel('$y$', size=14, labelpad=-21, y=1.02, rotation=0)
ax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)
# ax.xlim(train_begin_radians, train_end_radians)
# ax.ylim(-1.5, 1.5)
plt.show()

Defining Models in Push with Particles
Users can represent a Bayesian neural network (BNN) in Push as a concurrently-executing and communicating ensemble of particles. This consists of two components.
Push provides functionality to wrap an arbitrary PyTorch module as a particle. This enables Push users to use a wide range of predefined models.
Push enables orchestrating ensembles of particles, concurrent execution of particles, and communications between particles using the
PusHconstruct. This enables Push users to easily implement concurrent Bayesian inference algorithms on multiple devices. Additionally, Push supplies various off-the-shelf inference algorithms.
Model Part 1: Neural Network Architecture Template
For the purposes of this tutorial, we introduce a simple neural network (NN) model now. This NN architecture will be used as a template to create instances of particles. The model is comprised of two components. 1. Each MiniNN contains two fully-connected layers of dimension \(D\) and uses a ReLU activation function. 2. A BiggerNN is built out of \(n\) MiniNN NN blocks. In general, an arbitrary PyTorch model can be used.
[3]:
import torch.nn as nn
class MiniNN(nn.Module):
def __init__(self, D):
super(MiniNN, self).__init__()
self.fc1 = nn.Linear(D, D)
self.fc2 = nn.Linear(D, D)
def forward(self, x):
x = self.fc1(x)
x = torch.nn.ReLU()(x)
x = self.fc2(x)
return x
class BiggerNN(nn.Module):
def __init__(self, n, input_dim, output_dim, hidden_dim):
super(BiggerNN, self).__init__()
self.minis = []
self.n = n
self.input_layer = nn.Linear(input_dim, hidden_dim)
for i in range(0, n):
self.minis += [MiniNN(hidden_dim)]
self.add_module("mini_layer"+str(i), self.minis[-1])
self.fc = nn.Linear(hidden_dim, output_dim)
def forward(self, x):
x = self.input_layer(x)
for i in range(0, self.n):
x = self.minis[i](x)
return self.fc(x)
Model Part 2: Ensemble of Particles
The construct PusH enables Push users to orchestrate a concurrent and communicating ensemble of particles. This means that each particle has its own logical thread of execution and can coordinate with other particles to perform computations. We give an example of calling PusH with the arguments below now.
BiggerNN: the NN architecture used as a template to create particles.*args: the hyperparameters for the NN architecture. For aBiggerNN, this includes the number ofMiniNNlayers, the size of the input dimension, the size of the output dimension, and the size of the hidden dimension.
[4]:
import push.push
from push.bayes.ensemble import mk_optim
from push.bayes.ensemble import mk_scheduler
args = [ # BiggerNN arguments
8, # number of layers
1, # input dimension
1, # output dimension
32 # hidden dimension
]
num_ensembles = 4
# Create a communicating ensemble of particles using BiggerNN(*args) as a template.
with push.push.PusH(BiggerNN, *args) as push_dist:
pids = []
for i in range(num_ensembles):
# 1. Each particle has a unique `pid`.
# 2. `mk_optim` is a particle specific optimization method as in standard PyTorch.
# 3. Create a particle on device 0.
# 4. `receive` determines how each particle .
# 5. `state` is the state associated with each particle.
pids += [push_dist.p_create(mk_optim, mk_scheduler, device=0, receive={}, state={})]
Training Models in Push
After we have defined a PusH object, we can use the orchestration capabilities of Push to train each particle, possibly with interaction between different particles during training. In this tutorial, we choose one of the simplest methods–deep ensembles–where there is no communication between different particles.
Training Deep Ensembles in Push
A deep ensemble with \(k\) ensembles trains \(k\) instances of a NN architecture to obtains \(k\) independently-trained models. Each trained model can be interpreted as the parameter setting corresponding to a sample from a suitably defined posterior distribution on NN parameters. In this way, a deep ensemble can be seen as a BDL method. To train a deep ensemble in Push, we use an implementation of an Ensemble object provided by Push in push.bayes.ensemble. The Ensemble
object encapsulates a communicating and concurrently executing ensemble of particles.
[5]:
from push.bayes.ensemble import Ensemble
from push.bayes.swag import MultiSWAG
# 1. `BiggerNN` is a NN template
# 2. `args` contains the hyper-parameters of `BiggerNN`.
ensemble = Ensemble(BiggerNN, *args, num_devices=2)
We can peform Bayesian inference on an Ensemble with the bayes_infer method. This method requires:
A dataloader (
torch.utils.data).A number of epochs to train for (
int).An optional loss function (
torch.nn.MSELoss) for training.The number of ensembles (
int).
In this example, we will be using 2 ensembles.
[6]:
from torch.utils.data import DataLoader
# 1. Create dataloader
batch_size = 128
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
epochs = 1000
# 2. Perform Bayesian inference
ensemble.bayes_infer(dataloader, epochs, loss_fn=torch.nn.MSELoss(), num_ensembles=2)
two_particle_ensemble = ensemble
100%|██████████| 1000/1000 [00:24<00:00, 41.48it/s, loss=tensor(0.3648)]
Training More Ensembles
One of the design goals of Push is to enable users to scale BDL methods to more particles. Below, we train an ensemble with 4 (four_particle_ensemble) and 8 (eight_particle_ensemble) particles. The function push.bayes.ensemble.train_deep_ensemble takes care of creating an Ensemble and calling bayes_infer.
[7]:
# Four particles
print('Training Four particles ...')
four_particle_ensemble = push.bayes.ensemble.train_deep_ensemble(
dataloader,
torch.nn.MSELoss(),
epochs,
BiggerNN, *args,
num_ensembles=32,
num_devices=2
)
# Eight particles"
print('Training Eight particles ...')
eight_particle_ensemble = push.bayes.ensemble.train_deep_ensemble(
dataloader,
torch.nn.MSELoss(),
epochs,
BiggerNN, *args,
num_ensembles=8,
num_devices=2
)
Training Four particles ...
100%|██████████| 1000/1000 [09:35<00:00, 1.74it/s, loss=tensor(0.3651)]
Training Eight particles ...
100%|██████████| 1000/1000 [01:06<00:00, 14.95it/s, loss=tensor(0.3646)]
Testing the Model
Now that we have successfully trained the deep ensemble, we can make predictions with the model. We create a test dataset first.
Creating Test Datasets
In Distribution Test
We test on the original dataset to quantify epistemic uncertainty. Any errors in predictions that are within our training set is assumed to be caused by design flaws in our model, and any uncertainty stems from uncertainty within our models.
[9]:
in_dist_loader = DataLoader(dataset, batch_size=batch_size, shuffle=False)
two_particle_outputs = two_particle_ensemble.posterior_pred(in_dist_loader, mode=['mean', 'median', 'min', 'max', 'std'])
four_particle_outputs = four_particle_ensemble.posterior_pred(in_dist_loader, mode=['mean', 'median', 'min', 'max', 'std'])
eight_particle_outputs = eight_particle_ensemble.posterior_pred(in_dist_loader, mode=['mean', 'median', 'min', 'max', 'std'])
Plotting our Results
[10]:
def plot_results(dataset, outputs, title, in_dist=False):
xs = dataset.xs
ys = dataset.ys
fig, ax = plt.subplots(figsize=(8,8))
# plt.figure(figsize=(8, 6))
pred_upper = outputs["mean"] + outputs["std"]
pred_lower = outputs["mean"] - outputs["std"]
ax.scatter(xs, ys, c="green", label="Training Data")
ax.plot(xs, outputs["mean"], color="red", lw=2, label="Mean Prediction")
ax.plot(normal_dataset.xs, normal_dataset.ys, c = "blue", label="Underlying Generated Data")
ax.spines['right'].set_visible(False)
ax.spines['top'].set_visible(False)
ax.spines['bottom'].set_position('zero')
ax.spines['left'].set_position('zero')
ax.set_xlabel('$x$', size=14, labelpad=-24, x=1.02)
ax.set_ylabel('$y$', size=14, labelpad=-21, y=.95, rotation=0)
ax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)
plt.plot(xs, pred_upper, "-r", alpha=0.5, lw=1)
plt.plot(xs, pred_lower, "-r", alpha=0.5, lw=1)
plt.fill_between(xs.view(-1).numpy(), pred_lower.flatten(), pred_upper.flatten(), color='r', alpha=0.3)
if in_dist:
plt.xlim(train_begin_radians, train_end_radians)
else:
plt.xlim(test_begin_radians, test_end_radians)
plt.axvline(x=train_begin_radians, color="black", linestyle="dotted")
plt.axvline(x=train_end_radians, color="black", linestyle="dotted")
# plt.ylim(-1.5, 1.5)
plt.title(title)
# plt.xlabel('X')
# plt.ylabel('Target (Y)')
plt.legend()
plt.show()
# fig, ax = plt.subplots(figsize=(8, 8))
# ax.scatter(dataset.xs, dataset.ys, c ='green', label="Training data")
# ax.plot(normal_dataset.xs, normal_dataset.ys, c = "blue", label="Underlying Generated Data")
# ax.plot()
# ax.legend()
# plt.xlabel('Input X')
# plt.ylabel('Target Y')
# ax.spines['right'].set_visible(False)
# ax.spines['top'].set_visible(False)
# ax.spines['bottom'].set_position('zero')
# ax.spines['left'].set_position('zero')
# ax.set_xlabel('$x$', size=14, labelpad=-24, x=1.02)
# ax.set_ylabel('$y$', size=14, labelpad=-21, y=1.02, rotation=0)
# ax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)
# plt.show()
Two particle results
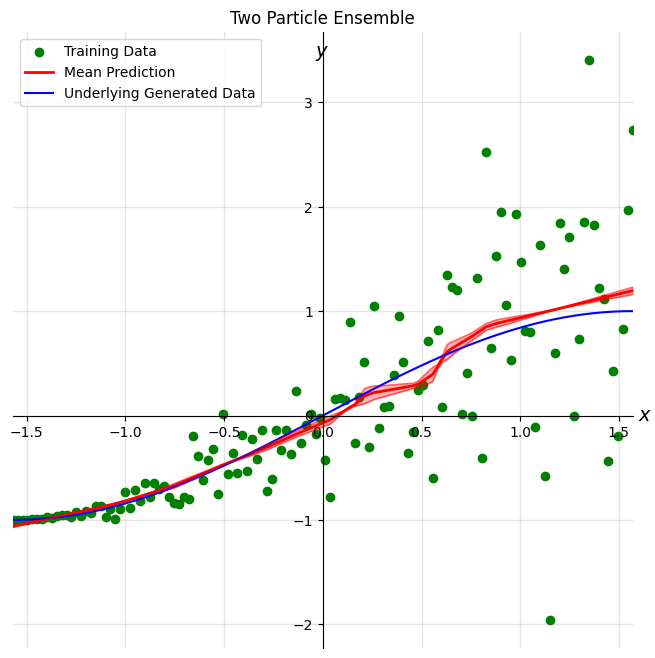
In a two particle ensemble, each ensemble can form it’s own predictions on the test dataset. The average prediction is given in solid blue. Both ensembles make accurate predictions when the data is within the training set (i.e., between the two vertical dashed lines). We see that when the data is outside the training data (i.e., to the left or right of the vertical dashed lines), the predictions made by both ensembles differs. The distance between the two predictions can be used to model uncertainty. Ideally, we would like the distances between different ensemble predictions to be high when it is less confident of its predictions and to be low when it is confident of its predictions. In this example, we get the desired behavior.
[11]:
plot_results(dataset, two_particle_outputs, 'Two Particle Ensemble', in_dist=True)
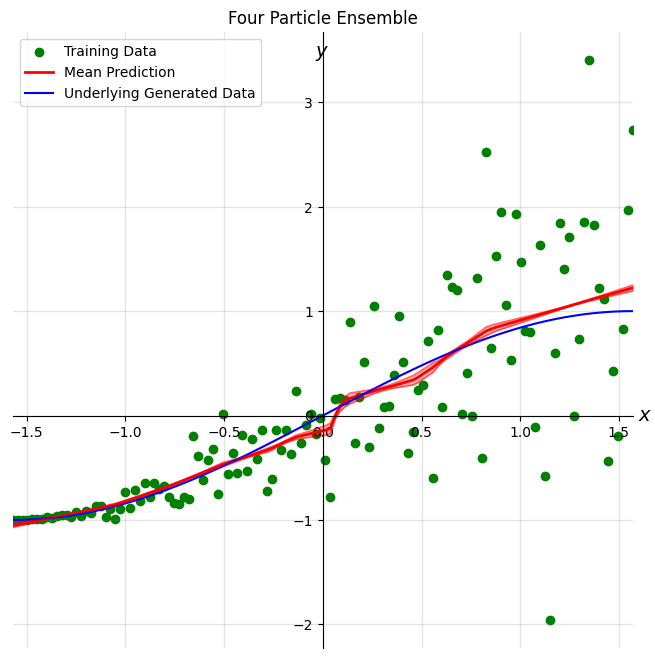
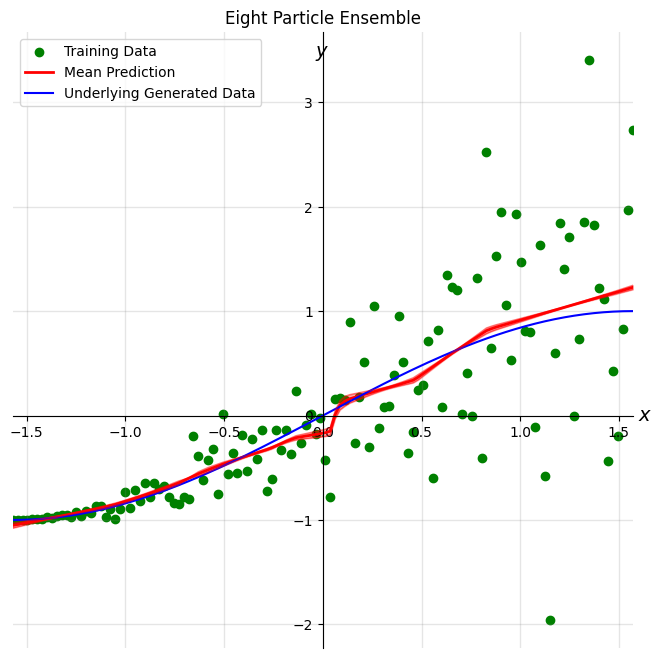
Four and eight particle results
[12]:
plot_results(dataset, four_particle_outputs, 'Four Particle Ensemble', in_dist=True)
plot_results(dataset, eight_particle_outputs, 'Eight Particle Ensemble', in_dist=True)
Out of Distribution Test
We set up a test dataset with the sine wave on the interval \((-2\pi, 2\pi)\) with \(N = 2048\) data points. This dataset will contain inputs that are outside of the training set, specifically inputs larger than \(\pi\) and smaller than \(-\pi\) will be considered out of distribution data. Testing on data that is out of distribution allows us to examine the aleotoric uncertainty. Aleotoric uncertainty pertains to uncertainty present inherently within the data.
[13]:
import numpy as np
test_begin_radians = -0.5 * math.pi
test_end_radians = 4 * math.pi
oos_dataset = SineWithNoiseDataset(N, D, test_begin_radians, test_end_radians)
test_dataloader = DataLoader(oos_dataset, batch_size=64, shuffle=False)
normal_dataset_extended = SineDataset(N, D, test_begin_radians, test_end_radians)
Making Predictions from the Posterior Predictive Distribution
After training (i.e., calling bayes_infer), the Ensemble class contains the posterior predictive distribution. In the case of a deep ensemble, the posterior predictive distribution is approximated by the set of trained ensembles. To make predictions using the posterior predictive distribution, the Ensemble class provides a posterior_pred method.
[15]:
two_particle_oos_outputs = two_particle_ensemble.posterior_pred(test_dataloader, mode=['mean', 'median', 'min', 'max', 'std'])
four_particle_oos_outputs = four_particle_ensemble.posterior_pred(test_dataloader, mode=['mean', 'median', 'min', 'max', 'std'])
eight_particle_oos_outputs = eight_particle_ensemble.posterior_pred(test_dataloader, mode=['mean', 'median', 'min', 'max', 'std'])
Uncertainty
Unlike traditional DL methods which provides a single point estimate, Bayesian methods provide the ability to quantify uncertainty. There are two kinds of uncertainty.
Aleoric uncertainty is inherent in the data itself, and arises from the stochastic nature of the underlying processs for how the data was generated. In this example’s dataset, the added noise term \(\epsilon\) is the source of aleotoric uncertainty.
Epistemic uncertainty is the uncertainty present in the model itself. Epistemic uncertainty can arise due to the lack of data. In this example, epistemic uncertainty may arise because we train the ensemble on the interval \((-2\pi, 2\pi)\), which may not be enough data to reveal the periodic nature of the sine wave. We can visualize epistemic uncertainty by plotting the confidence interval of predictions over our ensemble, which we do next.
Plotting our Results
We visualize the uncertainty in our deep ensemble predictions now.
[25]:
def plot_results(dataset, outputs, title, in_dist=False):
xs = dataset.xs
ys = dataset.ys
fig, ax = plt.subplots(figsize=(8,8))
# plt.figure(figsize=(8, 6))
pred_upper = outputs["mean"] + outputs["std"]
pred_lower = outputs["mean"] - outputs["std"]
# ax.scatter(xs, ys, c="green", label="Training Data")
ax.plot(xs, outputs["mean"], color="red", lw=2, label="Mean Prediction")
ax.plot(normal_dataset_extended.xs, normal_dataset_extended.ys, c = "blue", label="Underlying Generated Data")
ax.spines['right'].set_visible(False)
ax.spines['top'].set_visible(False)
ax.spines['bottom'].set_position('zero')
ax.spines['left'].set_position('zero')
ax.set_xlabel('$x$', size=14, labelpad=-24, x=1.02)
ax.set_ylabel('$y$', size=14, labelpad=-21, y=.95, rotation=0)
ax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)
plt.plot(xs, pred_upper, "-r", alpha=0.5, lw=1)
plt.plot(xs, pred_lower, "-r", alpha=0.5, lw=1)
plt.fill_between(xs.view(-1).numpy(), pred_lower.flatten(), pred_upper.flatten(), color='r', alpha=0.3)
if in_dist:
plt.xlim(train_begin_radians, train_end_radians)
else:
plt.xlim(test_begin_radians, test_end_radians)
plt.axvline(x=train_begin_radians, color="black", linestyle="dotted")
plt.axvline(x=train_end_radians, color="black", linestyle="dotted")
# plt.ylim(-1.5, 1.5)
plt.title(title)
# plt.xlabel('X')
# plt.ylabel('Target (Y)')
plt.legend()
plt.show()
Two particle results
In a two particle ensemble, each ensemble can form it’s own predictions on the test dataset. The average prediction is given in solid blue. Both ensembles make accurate predictions when the data is within the training set (i.e., between the two vertical dashed lines). We see that when the data is outside the training data (i.e., to the left or right of the vertical dashed lines), the predictions made by both ensembles differs. The distance between the two predictions can be used to model uncertainty. Ideally, we would like the distances between different ensemble predictions to be high when it is less confident of its predictions and to be low when it is confident of its predictions. In this example, we get the desired behavior.
[26]:
plot_results(oos_dataset, two_particle_oos_outputs, 'Two Particle Ensemble')

Four and eight particle results
We can also check how four and eight particle ensembles fair.
[27]:
plot_results(oos_dataset, four_particle_oos_outputs, 'Four Particle Ensemble')

[28]:
plot_results(oos_dataset, eight_particle_oos_outputs, 'Eight Particle Ensemble')

Particle Scaling
While training a deep ensemble can lead to additional capabilities such as uncertainty quantification, it comes at a cost, namely increased training time. In particular, training \(k\) ensembles will requires \(k\) times more training time, which may be prohibitively expensive. To solve this, Push enables users to take advantage of multi-GPU hardware by managing the concurrent execution and communication between particles in a seamless manner by simply specifying the number of GPUs to use.
Benchmarking a Simple Model
Below, we benchmark the average time per epoch for ensembles of size 2, 4, and 8 particles for 1 and 2 devices to demonstrate the scaling properties of Push on a simple model. Different models will exhibit different performance characteristics.
[ ]:
import time
# 1. Create dataloader
batch_size = 128
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
# 2. Model hyperparameters
n = 5
input_dim = 1
output_dim = 1
hidden_dim = 2048
epochs = 250
def get_ensemble_time(num_ensembles, devices):
epochs = 5
start_time = time.time()
push.bayes.ensemble.train_deep_ensemble(
dataloader,
torch.nn.MSELoss(),
epochs,
BiggerNN, n, input_dim, output_dim, hidden_dim,
num_devices=devices,
num_ensembles=num_ensembles,
cache_size=num_ensembles/devices,
view_size=num_ensembles/devices
)
end_time = time.time()
return (end_time - start_time) / epochs
ensemble_sizes = [2, 4, 8]
one_dev_times = []
two_dev_times = []
for size in ensemble_sizes:
one_dev_times.append(get_ensemble_time(size, 1))
two_dev_times.append(get_ensemble_time(size, 2))
100%|██████████| 5/5 [00:01<00:00, 2.81it/s]
100%|██████████| 5/5 [00:01<00:00, 4.15it/s]
100%|██████████| 5/5 [00:03<00:00, 1.40it/s]
100%|██████████| 5/5 [00:02<00:00, 2.30it/s]
100%|██████████| 5/5 [00:07<00:00, 1.43s/it]
100%|██████████| 5/5 [00:04<00:00, 1.17it/s]
Results
We see that running Push with two devices leads to faster training times compared to running Push with one device. The ideal scaleup is a 2x speedup. The current model operates on 1 dimensional data, and thus, does not utilize the GPU effectively. Consequently, we do not achieve the ideal speedup. Different models will exhibit different performance characteristics.
[ ]:
import numpy as np
# Plotting
log_size = np.log2(ensemble_sizes)
plt.figure(figsize=(10, 6))
plt.plot(log_size, one_dev_times, marker='o', label='One Device')
plt.plot(log_size, two_dev_times, marker='o', label='Two Devices')
plt.title('Ensemble PusH Scaling')
plt.xlabel('Particles')
plt.ylabel('Seconds')
plt.xticks(log_size, [f'$2^{{{int(x)}}}$' for x in log_size])
plt.legend()
plt.grid(True)
plt.show()

References
[1] Andrew Gordon Wilson and Pavel Izmailov. Bayesian deep learning and a probabilistic perspective of generalization. In Proceedings of the 34th International Conference on Neural Information Processing Systems, Neurips 2020.
[2] Kevin Murphy. Probabilistic Machine Learning: Advanced Topics. Chapter 17. MIT Press, 2023.